REK - VR Teleoperation for Humanoid Robotics
REK - Robot Platform
Client: REK
Events: REK0 (San Francisco), REK America (USA tour), REK1 (San Francisco)
Apps: REK Fighter, REK Spectator, REK Training (coming soon)
In a sentence
REK puts real people inside humanoid robots via VR - piloting them in real time at live events. The challenge is making that feel immediate and legible to both the pilot and the audience, while keeping the system safe and reliable enough to run in front of a crowd.
We’re supporting REK on the software and systems side, helping turn experimental robotics into a reliable live experience: VR piloting, mixed reality interfaces, AI-augmented spectator cams, end-to-end latency reduction, and event-ready tooling.

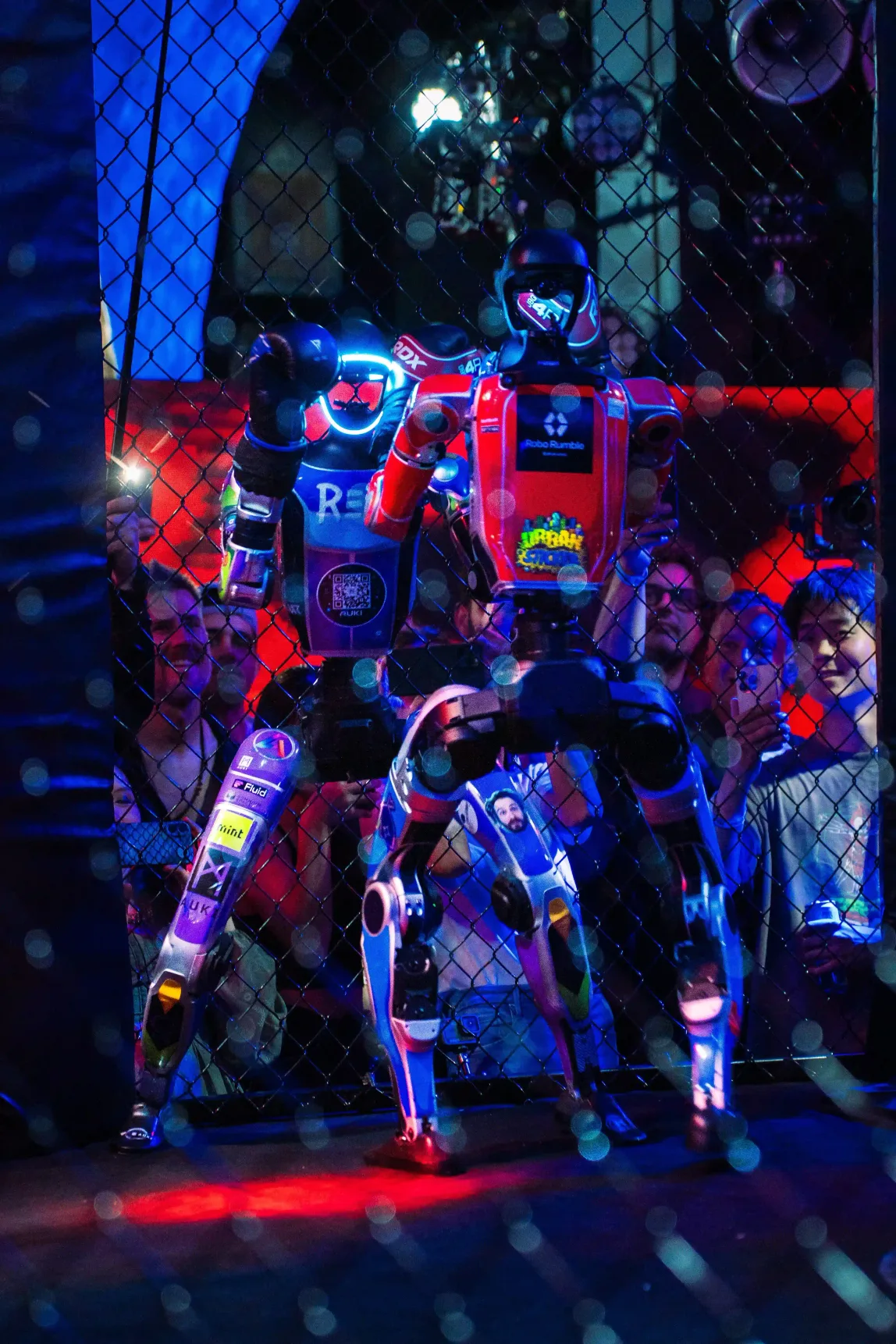
Pilot in VR, robot in the ring. The core REK setup - a person in a headset ringside, their movements translated into robot motion in real time.
What is REK?
REK pilots wear VR headsets and control humanoid robots at live events, with their physical movements translated into robot motion in real time. The format opens up an interesting question: what does it feel like to be inside a robot body, and how do you make that experience both controllable and watchable?
REK0 was an early live milestone in San Francisco that proved the format with two robots and a crowd.
REK1 is the next step: a flagship tournament-scale show designed to elevate production value, broaden audience reach, and grow the pilot pipeline.
REK1
REK1 is a flagship tournament-scale event at the historic Kezar Pavilion, San Francisco - held the night before the Big Game. Anyone who buys a ticket can apply to pilot a robot, opening the experience up to a much wider audience than a typical tech demo.
The brief and the challenge
Getting a humanoid robot to move is one problem. Making that movement feel immediate and legible - to the pilot wearing a headset and to the audience watching - is a much harder one. Add a live show environment and the bar rises again.
- Make piloting intuitive under pressure, using VR and mixed reality UI
- Reduce end-to-end latency so actions feel responsive and predictable
- Keep sessions stable and repeatable for live shows (setup, calibration, monitoring)
- Prioritise safety, especially with larger humanoids and high-energy movements
- Support rapid iteration between touring demos and event milestones (REK0 → REK1)
Our role
We have supported REK as an engineering partner from day one, working remotely from the UK. The focus has been bridging real-time / game-engine approaches with live production reliability and robotics constraints, including networking, UX, telemetry, and tool-building.

Hardware iteration and show prep: the practical realities of building something that has to run reliably in front of a crowd.
Building the robotic "reflex arc"
In biology, a reflex arc is the fastest neural pathway - stimulus to response with minimal delay. That's exactly what we've worked on for REK: the tightest possible loop between pilot intent and robot action.
What we did
Across R&D and live events, the work has centred on tightening that loop - making the pilot experience readable and responsive, while keeping the overall system robust for show conditions.
- VR piloting and mixed reality app - for triggering, managing, and monitoring actions
- Latency reduction - optimisation across the pipeline to tighten response time from pilot intent to robot motion
- Hybrid control approach - combining pilot intent with pre-trained motion policies, which the San Francisco team are working on for balance and punch quality
- Event tooling - spectator views, calibration workflows, and operational support for live shows
From experiments to REK0
Early work explored a range of teleoperation techniques and prototypes, quickly surfacing the real constraints: safety, balance, reliability, and the importance of a readable “motion language” for an audience.
REK0 was a key proof point: two robots, live crowd, VR pilots, and an entertaining audience experience. It also created a clear improvement list for the next milestone.
REK1
REK1 scaled the format into a tournament event at Kezar Pavilion, San Francisco - significantly larger crowd, wider pilot intake, and higher production value. For us it was the next round of iteration: tightening responsiveness, improving the pilot experience, and making the overall system more robust under show conditions.

REK1 - Kezar Pavilion, San Francisco. February 2026.
What’s next: multiplayer sim
REK is now building a multiplayer simulator - running the same physics, AI models, and robot behaviour used in the real events, so anyone can train as a pilot from anywhere in the world.
The sim is a direct bridge to the live show: strong performers earn the chance to pilot actual robots at REK events. It’s also a way to stress-test control approaches and gather data at scale before anything touches real hardware.
The same robots, physics, and pilot controls - available in the simulator ahead of the next live event.
REK on Steam
The REK simulator is free to play with online PvP, physics-based robot control, and cross-platform multiplayer. Wishlist on Steam.
Talk: BEYOND Conference
Watch: REK0 (full event recording)
Full recording of REK0.
Want to jump straight in? Open at beginning of event on YouTube.
VR180 on Apple Vision Pro
REK0 is also available to watch in VR180 on Apple Vision Pro via Vantage VR. Watching in immersive video makes the crowd scale and ring depth come across far better than a flat stream - you'll feel like you were there - and you can clearly see the VR pilots controlling the robots.